

【jdb电子游戏平台网站
网】目前,流体能量转换装置的结构形式种类较多,如叶片式、叶轮式、涡轮式、涡旋式、转轮式、旋片式、旋摆式、滑片式、齿轮式、螺杆式、罗茨式、爪式等。但这些结构形式要么存在偏心旋转运动,要么存在往复运动,要么密封性能欠佳等,从而导致很多缺陷的存在。
行星式流体能量转换结构通过巧妙设置行星辊的运动方式,较完美解决了容积可变、可靠密封、同心旋转三者之间的矛盾。
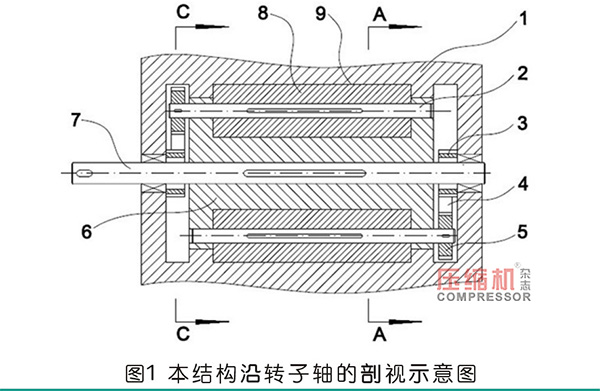
 如图1和图2所示,本行星式流体能量转换结构,包括定子1和位于定子1内腔中的转子6,转子6通过转子轴7可旋转地支撑在定子1的两端,转子6为圆柱体形,其在定子1内腔中与定子同轴线转动配合,在与转子6转动配合的定子1的圆柱形内腔壁上,沿周向开设有凹槽9,使定子1与转子6之间形成密闭工作腔12,该工作腔12横截面的内轮廓线为以转子6轴心为圆心、转子6半径为半径的圆,该工作腔12横截面的外轮廓线是由第一圆弧线17、第二圆弧线20、第一曲线16、第二曲线21、第三曲线19和第四曲线18连接而成的闭合线。
如图3所示,第一圆弧线17为圆弧线B1B4,第二圆弧线20为圆弧线B2B3,第一曲线16为曲线M1B1,第二曲线21为曲线M1B2,第三曲线19为曲线M2B3,第四曲线18为曲线M2B4。
如图1和图2所示,本行星式流体能量转换结构,包括定子1和位于定子1内腔中的转子6,转子6通过转子轴7可旋转地支撑在定子1的两端,转子6为圆柱体形,其在定子1内腔中与定子同轴线转动配合,在与转子6转动配合的定子1的圆柱形内腔壁上,沿周向开设有凹槽9,使定子1与转子6之间形成密闭工作腔12,该工作腔12横截面的内轮廓线为以转子6轴心为圆心、转子6半径为半径的圆,该工作腔12横截面的外轮廓线是由第一圆弧线17、第二圆弧线20、第一曲线16、第二曲线21、第三曲线19和第四曲线18连接而成的闭合线。
如图3所示,第一圆弧线17为圆弧线B1B4,第二圆弧线20为圆弧线B2B3,第一曲线16为曲线M1B1,第二曲线21为曲线M1B2,第三曲线19为曲线M2B3,第四曲线18为曲线M2B4。
 在转子6圆柱面上沿轴向开设有两个腔槽13,两个腔槽13在转子周向上互成180°,腔槽13横截面的轮廓线为圆弧线,腔槽13的两端面分别与凹槽9的两侧面齐平,腔槽13内设置有行星辊8,行星辊8通过辊轴2可旋转地支撑在转子6的两端,且行星辊8与腔槽13同轴线。行星辊8在腔槽13内与腔槽转动配合,行星辊8的两端面与腔槽13的两端面及凹槽9的两侧面贴合。
如图3和图4所示,行星辊8横截面的轮廓线是由第三圆弧线22、第四圆弧线24、第五曲线23和第六曲线25连接而成的闭合线,第三圆弧线22为圆弧线D1D4,第四圆弧线24为圆弧线D2D3,第五曲线23为曲线D1D2,第六曲线25为曲线D3D4,该轮廓线是关于行星辊8横截面中心点成中心对称的图形,在以该中心点为原点的平面直角坐标系中(图4中的水平点画线为横坐标轴,垂直点画线为纵坐标轴),第五曲线23与第六曲线25相对于横坐标轴对称。
在转子6圆柱面上沿轴向开设有两个腔槽13,两个腔槽13在转子周向上互成180°,腔槽13横截面的轮廓线为圆弧线,腔槽13的两端面分别与凹槽9的两侧面齐平,腔槽13内设置有行星辊8,行星辊8通过辊轴2可旋转地支撑在转子6的两端,且行星辊8与腔槽13同轴线。行星辊8在腔槽13内与腔槽转动配合,行星辊8的两端面与腔槽13的两端面及凹槽9的两侧面贴合。
如图3和图4所示,行星辊8横截面的轮廓线是由第三圆弧线22、第四圆弧线24、第五曲线23和第六曲线25连接而成的闭合线,第三圆弧线22为圆弧线D1D4,第四圆弧线24为圆弧线D2D3,第五曲线23为曲线D1D2,第六曲线25为曲线D3D4,该轮廓线是关于行星辊8横截面中心点成中心对称的图形,在以该中心点为原点的平面直角坐标系中(图4中的水平点画线为横坐标轴,垂直点画线为纵坐标轴),第五曲线23与第六曲线25相对于横坐标轴对称。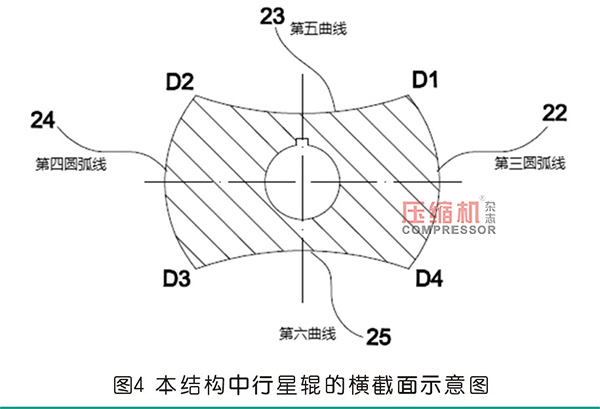 如图3所示,工作腔12横截面的外轮廓线中,第一圆弧线17连接在第一曲线16与第四曲线18之间,第一圆弧线17的两个端点为B1点和B4点;第二圆弧线20连接在第二曲线21与第三曲线19之间,第二圆弧线20的两个端点为B2点和B3点;第一曲线16与第二曲线21连接于M1点,第三曲线19与第四曲线18连接于M2点,第一、第二圆弧线17、20是以转子6轴心为圆心的圆弧线,工作腔12横截面的外轮廓线是关于转子6横截面中心点成中心对称的图形,在以该中心点为原点的平面直角坐标系中(图3中的水平点画线为横坐标轴,垂直点画线为纵坐标轴),第一曲线16与第二曲线21、第三曲线19与第四曲线18、以及第一圆弧线17与第二圆弧线20分别相对于纵坐标轴对称,第一曲线16与第四曲线18、以及第二曲线21与第三曲线19相对于横坐标轴对称。
第一曲线16的方程式为:
(x-a)2+(y-b)2-R12=0
其中,0≤x≤a·R3·(R3-R1)-1,b·R3·(R3-R1)-1≤y≤(R1+b),
也就是说,M1点的横坐标为0、纵坐标为R2,B1点的横坐标为a·R3·(R3- R1)-1、纵坐标为b·R3·(R3- R1)-1,B2点的横坐标为- a·R3·(R3- R1)-1、纵坐标为b·R3·(R3- R1)-1;
第五曲线23的方程式为:
x2+(y-R2)2-R12=0,
其中,-a≤x≤a,(R2- R1)≤y≤b,
第三圆弧线22与第四圆弧线24相对于纵坐标轴对称,第三、第四圆弧线22、24的半径与腔槽13横截面轮廓线的半径一致,为R3- R1;
上述各式中:
a=R1·(1-((R22+2·R1·R3-R32)·(2· R1·R2)-1)2)1/2,
b=(R22-2·R1·R3+R32)·(2·R2)-1,
R1为行星辊8轴线与转子6轴线之间的距离,R2为转子6的半径,R3为工作腔12横截面外轮廓线中第一、第二圆弧线(17、20)的半径。
根据第一曲线16的方程可知,第一曲线实际就是以坐标(a,b)为圆心、R1为半径的圆弧线,B1点是该圆弧线与坐标(0,0)为圆心、R3为半径的圆相切的点,其余第二曲线21、第三曲线19、第四曲线18的曲线方程、以及B2点、B3点、B4点的坐标可根据对称关系求得。
如图3所示,实际上第五曲线23是第一曲线16与第二曲线21的连接点M1在行星辊8横截面上划出的轨迹,第六曲线25是第三曲线19与第四曲线18的连接点M2在行星辊8横截面上划出的轨迹线,第一曲线16是第五曲线23与第三圆弧线22的连接点D1在定子1的凹槽9底面上划出的轨迹线,第二曲线21是第五曲线23与第四圆弧线24的连接点D2在定子1的凹槽9底面上划出的轨迹线,第三曲线19是第六曲线25与第四圆弧线24的连接点D3在定子1的凹槽9底面上划出的轨迹线,第四曲线18是第六曲线25与第三圆弧线22的连接点D4在定子1的凹槽9底面上划出的轨迹线。
如图3所示,工作腔12横截面的外轮廓线中,第一圆弧线17连接在第一曲线16与第四曲线18之间,第一圆弧线17的两个端点为B1点和B4点;第二圆弧线20连接在第二曲线21与第三曲线19之间,第二圆弧线20的两个端点为B2点和B3点;第一曲线16与第二曲线21连接于M1点,第三曲线19与第四曲线18连接于M2点,第一、第二圆弧线17、20是以转子6轴心为圆心的圆弧线,工作腔12横截面的外轮廓线是关于转子6横截面中心点成中心对称的图形,在以该中心点为原点的平面直角坐标系中(图3中的水平点画线为横坐标轴,垂直点画线为纵坐标轴),第一曲线16与第二曲线21、第三曲线19与第四曲线18、以及第一圆弧线17与第二圆弧线20分别相对于纵坐标轴对称,第一曲线16与第四曲线18、以及第二曲线21与第三曲线19相对于横坐标轴对称。
第一曲线16的方程式为:
(x-a)2+(y-b)2-R12=0
其中,0≤x≤a·R3·(R3-R1)-1,b·R3·(R3-R1)-1≤y≤(R1+b),
也就是说,M1点的横坐标为0、纵坐标为R2,B1点的横坐标为a·R3·(R3- R1)-1、纵坐标为b·R3·(R3- R1)-1,B2点的横坐标为- a·R3·(R3- R1)-1、纵坐标为b·R3·(R3- R1)-1;
第五曲线23的方程式为:
x2+(y-R2)2-R12=0,
其中,-a≤x≤a,(R2- R1)≤y≤b,
第三圆弧线22与第四圆弧线24相对于纵坐标轴对称,第三、第四圆弧线22、24的半径与腔槽13横截面轮廓线的半径一致,为R3- R1;
上述各式中:
a=R1·(1-((R22+2·R1·R3-R32)·(2· R1·R2)-1)2)1/2,
b=(R22-2·R1·R3+R32)·(2·R2)-1,
R1为行星辊8轴线与转子6轴线之间的距离,R2为转子6的半径,R3为工作腔12横截面外轮廓线中第一、第二圆弧线(17、20)的半径。
根据第一曲线16的方程可知,第一曲线实际就是以坐标(a,b)为圆心、R1为半径的圆弧线,B1点是该圆弧线与坐标(0,0)为圆心、R3为半径的圆相切的点,其余第二曲线21、第三曲线19、第四曲线18的曲线方程、以及B2点、B3点、B4点的坐标可根据对称关系求得。
如图3所示,实际上第五曲线23是第一曲线16与第二曲线21的连接点M1在行星辊8横截面上划出的轨迹,第六曲线25是第三曲线19与第四曲线18的连接点M2在行星辊8横截面上划出的轨迹线,第一曲线16是第五曲线23与第三圆弧线22的连接点D1在定子1的凹槽9底面上划出的轨迹线,第二曲线21是第五曲线23与第四圆弧线24的连接点D2在定子1的凹槽9底面上划出的轨迹线,第三曲线19是第六曲线25与第四圆弧线24的连接点D3在定子1的凹槽9底面上划出的轨迹线,第四曲线18是第六曲线25与第三圆弧线22的连接点D4在定子1的凹槽9底面上划出的轨迹线。
 如图1和图5所示,在转子6端面侧设置有行星辊同步控制机构(同步机构可视情况灵活设置),该行星辊同步控制机构包括同步齿轮5、中心齿轮3和同步齿形皮带4,同步齿轮5固定在辊轴2的一端,中心齿轮3固定在定子1上且与转子6同轴线,中心齿轮3与同步齿轮5通过同步齿形皮带4传动连接。当转子6旋转时,在行星辊同步控制机构作用下,两只行星辊8相对于转子6做转速相同、方向相反的旋转运动,两只行星辊8相对于定子1相当于只作没有自转的圆周平移运动。
如图2所示,在定子1上开设有与工作腔12相通的两个流体进口11和两个流体出口10,两个流体进口11在定子1内壁上的贯通口分别位于第一、第三曲线16、19所对应的定子内壁曲面上,两个流体出口10在定子1内壁上的贯通口分别位于第二、第四曲线21、18所对应的定子内壁曲面上,位于第一曲线16和第二曲线21所对应的定子内壁曲面上的一组流体进口11和流体出口10,以及位于第三曲线19和第四曲线18所对应的定子内壁曲面上的一组流体进口和流体出口能够分别被第五曲线23、第六曲线25所对应的行星辊曲面同时遮盖,这样,两个流体进口11与两个流体出口10之间均不能直接连通,能够避免因流体进口与流体出口直接连通而引起的流体泄漏(两个流体进口11和两个流体出口10在定子内壁上的贯通口亦可位于定子端部内壁上)。
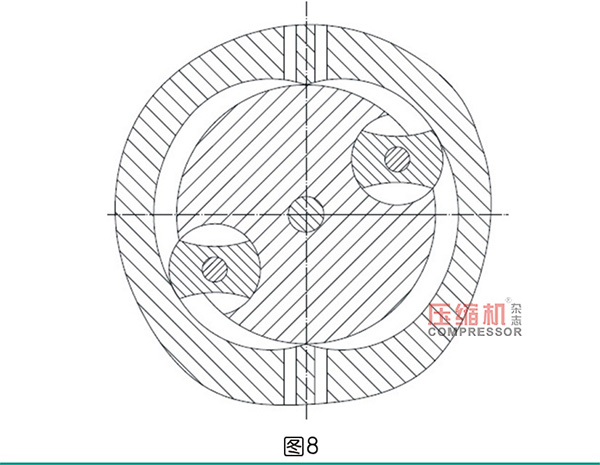
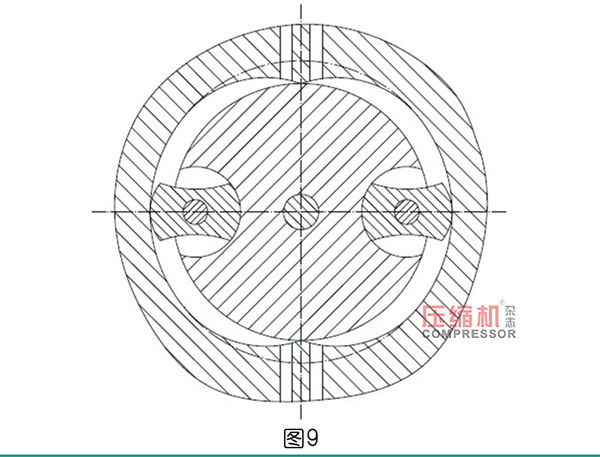
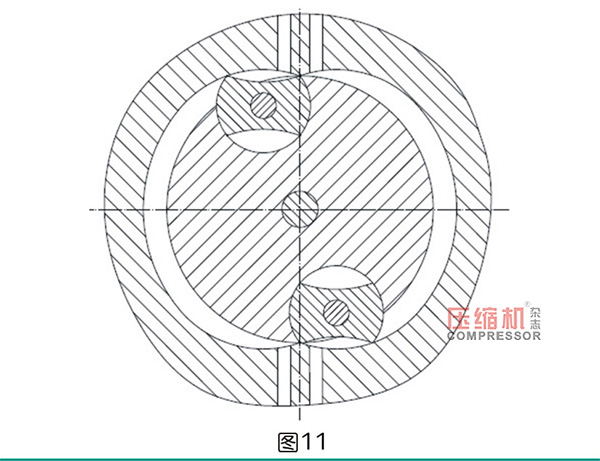
图6至图12表示了转子6在定子1内沿顺时针方向旋转半周过程中的状态,结合图3,转子6在定子1内旋转一周过程中,D1点所对应的行星辊8的顶角棱线仅与第一曲线16所对应的曲面接触,D2点所对应的行星辊8的顶角棱线仅与第二曲线21所对应的曲面接触,D3点所对应的行星辊8的顶角棱线仅与第三曲线19所对应的曲面接触,D4点所对应的行星辊8的顶角棱线仅与第四曲线18所对应的曲面接触,第三圆弧线22所对应的行星辊8圆弧面仅与第一圆弧线17所对应的定子1内壁圆弧面接触,第四圆弧线24所对应的行星辊8圆弧面仅与第二圆弧线20所对应的定子1内壁圆弧面接触,M1点所对应的定子1的内壁棱线除与转子6圆柱面接触外,还与第五曲线23所对应的行星辊8曲面接触,M2点所对应的定子1的内壁棱线除与转子6圆柱面接触外,还与第六曲线25所对应的行星辊8曲面接触。
行星辊8上D1点、D2点、D3点、D4点所对应的顶角棱线(密封条),分别只负责第一、第二、第三、第四曲线所对应的定子内壁曲面的密封,接触时间短,磨损较小。
如图1和图5所示,在转子6端面侧设置有行星辊同步控制机构(同步机构可视情况灵活设置),该行星辊同步控制机构包括同步齿轮5、中心齿轮3和同步齿形皮带4,同步齿轮5固定在辊轴2的一端,中心齿轮3固定在定子1上且与转子6同轴线,中心齿轮3与同步齿轮5通过同步齿形皮带4传动连接。当转子6旋转时,在行星辊同步控制机构作用下,两只行星辊8相对于转子6做转速相同、方向相反的旋转运动,两只行星辊8相对于定子1相当于只作没有自转的圆周平移运动。
如图2所示,在定子1上开设有与工作腔12相通的两个流体进口11和两个流体出口10,两个流体进口11在定子1内壁上的贯通口分别位于第一、第三曲线16、19所对应的定子内壁曲面上,两个流体出口10在定子1内壁上的贯通口分别位于第二、第四曲线21、18所对应的定子内壁曲面上,位于第一曲线16和第二曲线21所对应的定子内壁曲面上的一组流体进口11和流体出口10,以及位于第三曲线19和第四曲线18所对应的定子内壁曲面上的一组流体进口和流体出口能够分别被第五曲线23、第六曲线25所对应的行星辊曲面同时遮盖,这样,两个流体进口11与两个流体出口10之间均不能直接连通,能够避免因流体进口与流体出口直接连通而引起的流体泄漏(两个流体进口11和两个流体出口10在定子内壁上的贯通口亦可位于定子端部内壁上)。
图6至图12表示了转子6在定子1内沿顺时针方向旋转半周过程中的状态,结合图3,转子6在定子1内旋转一周过程中,D1点所对应的行星辊8的顶角棱线仅与第一曲线16所对应的曲面接触,D2点所对应的行星辊8的顶角棱线仅与第二曲线21所对应的曲面接触,D3点所对应的行星辊8的顶角棱线仅与第三曲线19所对应的曲面接触,D4点所对应的行星辊8的顶角棱线仅与第四曲线18所对应的曲面接触,第三圆弧线22所对应的行星辊8圆弧面仅与第一圆弧线17所对应的定子1内壁圆弧面接触,第四圆弧线24所对应的行星辊8圆弧面仅与第二圆弧线20所对应的定子1内壁圆弧面接触,M1点所对应的定子1的内壁棱线除与转子6圆柱面接触外,还与第五曲线23所对应的行星辊8曲面接触,M2点所对应的定子1的内壁棱线除与转子6圆柱面接触外,还与第六曲线25所对应的行星辊8曲面接触。
行星辊8上D1点、D2点、D3点、D4点所对应的顶角棱线(密封条),分别只负责第一、第二、第三、第四曲线所对应的定子内壁曲面的密封,接触时间短,磨损较小。
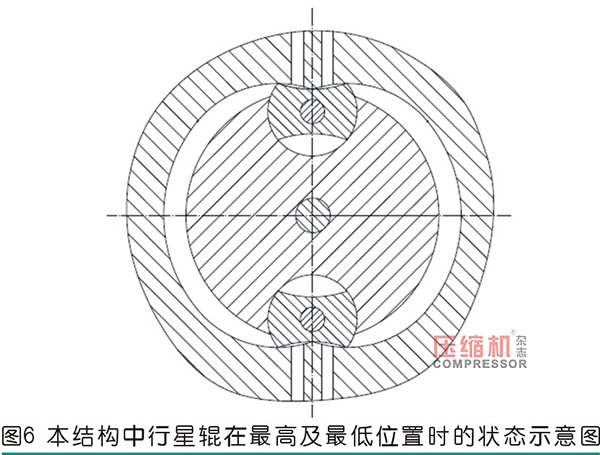 如图6所示,两只行星辊8分别位于定子1内的最高和最低位置,此时两组流体进口11和流体出口10分别被第五曲线23、第六曲线25所对应的行星辊曲面同时遮盖,两个流体进口11和两个流体出口10均不能与工作腔12连通。
当高压流体经两个流体进口11进入定子1内腔后,高压流体给予两只行星辊8压力,从而带动转子6旋转。转子6旋转过程中,两只行星辊8又不断将工作腔12内的流体从两个流体出口10压出,从而将流体的能量转换为输出动力,如汽轮机、水轮机、气动马达、液压马达等。
机械动力通过转子轴7驱动转子6旋转过程中,工作腔12容积产生变化,流体在负压作用下从两个流体进口11进入工作腔12内,并在行星辊8的高压作用下从两个流体出口10排出,从而将机械能转换为流体动能实现流体输送,如jdb电子游戏平台网站
、液压泵、真空泵、鼓风机等。
如图6所示,两只行星辊8分别位于定子1内的最高和最低位置,此时两组流体进口11和流体出口10分别被第五曲线23、第六曲线25所对应的行星辊曲面同时遮盖,两个流体进口11和两个流体出口10均不能与工作腔12连通。
当高压流体经两个流体进口11进入定子1内腔后,高压流体给予两只行星辊8压力,从而带动转子6旋转。转子6旋转过程中,两只行星辊8又不断将工作腔12内的流体从两个流体出口10压出,从而将流体的能量转换为输出动力,如汽轮机、水轮机、气动马达、液压马达等。
机械动力通过转子轴7驱动转子6旋转过程中,工作腔12容积产生变化,流体在负压作用下从两个流体进口11进入工作腔12内,并在行星辊8的高压作用下从两个流体出口10排出,从而将机械能转换为流体动能实现流体输送,如jdb电子游戏平台网站
、液压泵、真空泵、鼓风机等。



来源:本站原创
行星式流体能量转换结构通过巧妙设置行星辊的运动方式,较完美解决了容积可变、可靠密封、同心旋转三者之间的矛盾。
如图1和图2所示,本行星式流体能量转换结构,包括定子1和位于定子1内腔中的转子6,转子6通过转子轴7可旋转地支撑在定子1的两端,转子6为圆柱体形,其在定子1内腔中与定子同轴线转动配合,在与转子6转动配合的定子1的圆柱形内腔壁上,沿周向开设有凹槽9,使定子1与转子6之间形成密闭工作腔12,该工作腔12横截面的内轮廓线为以转子6轴心为圆心、转子6半径为半径的圆,该工作腔12横截面的外轮廓线是由第一圆弧线17、第二圆弧线20、第一曲线16、第二曲线21、第三曲线19和第四曲线18连接而成的闭合线。
如图3所示,第一圆弧线17为圆弧线B1B4,第二圆弧线20为圆弧线B2B3,第一曲线16为曲线M1B1,第二曲线21为曲线M1B2,第三曲线19为曲线M2B3,第四曲线18为曲线M2B4。
在转子6圆柱面上沿轴向开设有两个腔槽13,两个腔槽13在转子周向上互成180°,腔槽13横截面的轮廓线为圆弧线,腔槽13的两端面分别与凹槽9的两侧面齐平,腔槽13内设置有行星辊8,行星辊8通过辊轴2可旋转地支撑在转子6的两端,且行星辊8与腔槽13同轴线。行星辊8在腔槽13内与腔槽转动配合,行星辊8的两端面与腔槽13的两端面及凹槽9的两侧面贴合。
如图3和图4所示,行星辊8横截面的轮廓线是由第三圆弧线22、第四圆弧线24、第五曲线23和第六曲线25连接而成的闭合线,第三圆弧线22为圆弧线D1D4,第四圆弧线24为圆弧线D2D3,第五曲线23为曲线D1D2,第六曲线25为曲线D3D4,该轮廓线是关于行星辊8横截面中心点成中心对称的图形,在以该中心点为原点的平面直角坐标系中(图4中的水平点画线为横坐标轴,垂直点画线为纵坐标轴),第五曲线23与第六曲线25相对于横坐标轴对称。
如图3所示,工作腔12横截面的外轮廓线中,第一圆弧线17连接在第一曲线16与第四曲线18之间,第一圆弧线17的两个端点为B1点和B4点;第二圆弧线20连接在第二曲线21与第三曲线19之间,第二圆弧线20的两个端点为B2点和B3点;第一曲线16与第二曲线21连接于M1点,第三曲线19与第四曲线18连接于M2点,第一、第二圆弧线17、20是以转子6轴心为圆心的圆弧线,工作腔12横截面的外轮廓线是关于转子6横截面中心点成中心对称的图形,在以该中心点为原点的平面直角坐标系中(图3中的水平点画线为横坐标轴,垂直点画线为纵坐标轴),第一曲线16与第二曲线21、第三曲线19与第四曲线18、以及第一圆弧线17与第二圆弧线20分别相对于纵坐标轴对称,第一曲线16与第四曲线18、以及第二曲线21与第三曲线19相对于横坐标轴对称。
第一曲线16的方程式为:
(x-a)2+(y-b)2-R12=0
其中,0≤x≤a·R3·(R3-R1)-1,b·R3·(R3-R1)-1≤y≤(R1+b),
也就是说,M1点的横坐标为0、纵坐标为R2,B1点的横坐标为a·R3·(R3- R1)-1、纵坐标为b·R3·(R3- R1)-1,B2点的横坐标为- a·R3·(R3- R1)-1、纵坐标为b·R3·(R3- R1)-1;
第五曲线23的方程式为:
x2+(y-R2)2-R12=0,
其中,-a≤x≤a,(R2- R1)≤y≤b,
第三圆弧线22与第四圆弧线24相对于纵坐标轴对称,第三、第四圆弧线22、24的半径与腔槽13横截面轮廓线的半径一致,为R3- R1;
上述各式中:
a=R1·(1-((R22+2·R1·R3-R32)·(2· R1·R2)-1)2)1/2,
b=(R22-2·R1·R3+R32)·(2·R2)-1,
R1为行星辊8轴线与转子6轴线之间的距离,R2为转子6的半径,R3为工作腔12横截面外轮廓线中第一、第二圆弧线(17、20)的半径。
根据第一曲线16的方程可知,第一曲线实际就是以坐标(a,b)为圆心、R1为半径的圆弧线,B1点是该圆弧线与坐标(0,0)为圆心、R3为半径的圆相切的点,其余第二曲线21、第三曲线19、第四曲线18的曲线方程、以及B2点、B3点、B4点的坐标可根据对称关系求得。
如图3所示,实际上第五曲线23是第一曲线16与第二曲线21的连接点M1在行星辊8横截面上划出的轨迹,第六曲线25是第三曲线19与第四曲线18的连接点M2在行星辊8横截面上划出的轨迹线,第一曲线16是第五曲线23与第三圆弧线22的连接点D1在定子1的凹槽9底面上划出的轨迹线,第二曲线21是第五曲线23与第四圆弧线24的连接点D2在定子1的凹槽9底面上划出的轨迹线,第三曲线19是第六曲线25与第四圆弧线24的连接点D3在定子1的凹槽9底面上划出的轨迹线,第四曲线18是第六曲线25与第三圆弧线22的连接点D4在定子1的凹槽9底面上划出的轨迹线。
如图1和图5所示,在转子6端面侧设置有行星辊同步控制机构(同步机构可视情况灵活设置),该行星辊同步控制机构包括同步齿轮5、中心齿轮3和同步齿形皮带4,同步齿轮5固定在辊轴2的一端,中心齿轮3固定在定子1上且与转子6同轴线,中心齿轮3与同步齿轮5通过同步齿形皮带4传动连接。当转子6旋转时,在行星辊同步控制机构作用下,两只行星辊8相对于转子6做转速相同、方向相反的旋转运动,两只行星辊8相对于定子1相当于只作没有自转的圆周平移运动。
如图2所示,在定子1上开设有与工作腔12相通的两个流体进口11和两个流体出口10,两个流体进口11在定子1内壁上的贯通口分别位于第一、第三曲线16、19所对应的定子内壁曲面上,两个流体出口10在定子1内壁上的贯通口分别位于第二、第四曲线21、18所对应的定子内壁曲面上,位于第一曲线16和第二曲线21所对应的定子内壁曲面上的一组流体进口11和流体出口10,以及位于第三曲线19和第四曲线18所对应的定子内壁曲面上的一组流体进口和流体出口能够分别被第五曲线23、第六曲线25所对应的行星辊曲面同时遮盖,这样,两个流体进口11与两个流体出口10之间均不能直接连通,能够避免因流体进口与流体出口直接连通而引起的流体泄漏(两个流体进口11和两个流体出口10在定子内壁上的贯通口亦可位于定子端部内壁上)。
图6至图12表示了转子6在定子1内沿顺时针方向旋转半周过程中的状态,结合图3,转子6在定子1内旋转一周过程中,D1点所对应的行星辊8的顶角棱线仅与第一曲线16所对应的曲面接触,D2点所对应的行星辊8的顶角棱线仅与第二曲线21所对应的曲面接触,D3点所对应的行星辊8的顶角棱线仅与第三曲线19所对应的曲面接触,D4点所对应的行星辊8的顶角棱线仅与第四曲线18所对应的曲面接触,第三圆弧线22所对应的行星辊8圆弧面仅与第一圆弧线17所对应的定子1内壁圆弧面接触,第四圆弧线24所对应的行星辊8圆弧面仅与第二圆弧线20所对应的定子1内壁圆弧面接触,M1点所对应的定子1的内壁棱线除与转子6圆柱面接触外,还与第五曲线23所对应的行星辊8曲面接触,M2点所对应的定子1的内壁棱线除与转子6圆柱面接触外,还与第六曲线25所对应的行星辊8曲面接触。
行星辊8上D1点、D2点、D3点、D4点所对应的顶角棱线(密封条),分别只负责第一、第二、第三、第四曲线所对应的定子内壁曲面的密封,接触时间短,磨损较小。
如图6所示,两只行星辊8分别位于定子1内的最高和最低位置,此时两组流体进口11和流体出口10分别被第五曲线23、第六曲线25所对应的行星辊曲面同时遮盖,两个流体进口11和两个流体出口10均不能与工作腔12连通。
当高压流体经两个流体进口11进入定子1内腔后,高压流体给予两只行星辊8压力,从而带动转子6旋转。转子6旋转过程中,两只行星辊8又不断将工作腔12内的流体从两个流体出口10压出,从而将流体的能量转换为输出动力,如汽轮机、水轮机、气动马达、液压马达等。
机械动力通过转子轴7驱动转子6旋转过程中,工作腔12容积产生变化,流体在负压作用下从两个流体进口11进入工作腔12内,并在行星辊8的高压作用下从两个流体出口10排出,从而将机械能转换为流体动能实现流体输送,如jdb电子游戏平台网站
、液压泵、真空泵、鼓风机等。
来源:本站原创

网友评论
条评论
最新评论